具備污垢判別能力的智能化水池清洗器
1引言
各類蓄水池池底及池壁受水中雜物和污漬的侵蝕、污染、沉淀,需要定期清洗。以游泳池為例:傳統的方法是人工操作,利用附帶水泵吸管的排刷清洗頭來回拖動擦洗池底或池壁,同時水泵將污垢和池水一起抽出。該作業勞動強度大,效率底,水資源浪費嚴重。
本文介紹的智能化水池清洗器,是一種采用混濁度檢測傳感器和自適應控制原理,在工作中能自動判別沉淀在池底的不同的污垢分布,并采取相應清洗力度的水下清洗機械裝置,主要適用于專業或經營性游泳場館以及有類似需求的蓄水池,屬于智能化電動器具。
主要技術參數如下:額定電壓42V;爬行速度8~40m/min;清洗水泵流量1200L/min;最大作業水深10m;清洗吸力80N;控制方式為工業控制計算機。
2水池清洗器工作原理
清洗器的工作原理類似于吸塵器,即采用循環水過濾法濾去水中的污垢雜質,過濾方式有濾紙或濾袋。水泵電機一般均采用單相交流電機或直流電機;清洗器的爬行驅動電機通常采用直流電機。滾動毛刷常用尼龍制成,也有用PVC材料的。主體結構基本以工程塑料、有色金屬或不銹鋼組成。
操作控制方面早期產品以接觸器、開關和繼電器等分立元器件為主,高級的有定時清洗加無線電遙控(仍帶電源電纜線)。隨著計算機技術的發展,單片機及PLC的應用,帶有多種時間清洗程序的清洗器應運而生,像法國CYBERNAUT SW—16 型清洗器,內置8個時間清洗程序;目前最新的控制系統已結合了當今機器人研究方面的智能化技術,清洗器通過快速檢測泳池的面積后,自動設置清洗時間程序,典型的有DOLPHIN系列產品,其控制系統又稱作SELF—DIAGNOSTIC SYSTEM,也是一種以時間為設置參數的自動清洗系統。
清洗器清洗到池壁時可采取倒退換道或轉彎換道兩種方法。測距傳感器有非接觸式的紅外光電傳感器和接觸式的機械行程開關。
3智能化水池清洗器設計
3.1污垢判別系統設計
水池清洗器發展至今,隨著新技術、新材料、新工藝的推廣應用和制造手段的日臻完善,工程師在結構件、功能器件以及材料的選用方面有了更大的回旋余地,但歸納起來在整體功能上不外乎是遙控加時間程序清洗,省力不省時。基于對水池池底沉淀物的分析表明,主要是沙石、毛發、棉絮、草葉等雜物,且呈現非均勻分布,所以單純的時間程序清洗無法從根本上解決清洗效率的問題。
假設在清洗作業中,清洗器能根據水池池底污垢的分布狀況自動調節其清洗力度,那么清洗器的工作效率將顯著提高,這就引入了自適應控制的概念。自適應控制屬于智能化控制技術的范疇,由它組成的自動控制系統能夠連續測量輸入信號和系統特性的變化,自動地改變系統的結構與參數,使系統具有適應環境的變化并始終保持優良品質,其原理框圖見圖1。
圖1.自適應控制系統框圖
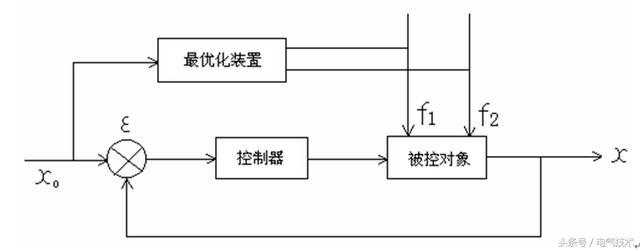
自適控制系統在金屬加工領域早已有應用,如自適應控制的立式銑床在銑削工件時,會根據刀具所受負荷的大小自動調節銑削進刀量,這就大大提高了加工效率。同樣,如果水池清洗器也采用自適應控制技術,增加一套判別污物分布的傳感器和數據分析處理系統作為清洗器的最優化裝置,那么也可以實現高效率的清洗,這就從實質上解決了清洗效率的問題。
怎樣判別污垢的多少?經過對各種傳感器的功能分析和篩選,提出二種可行的方案,即圖像識別系統和光電式濁度檢測系統(或稱混濁度傳感器),其系統框圖見圖2、3。
圖2 CCD圖像識別系統框圖
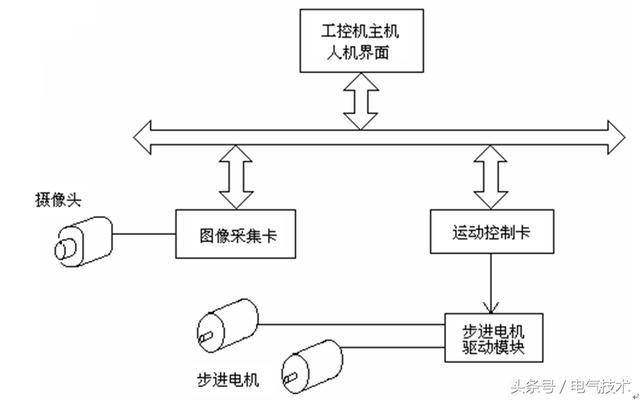
圖中表示,置于清洗器前端的CCD攝像器先選擇池底清潔面作為池底原始標準圖像存儲于工業控制計算機中,清洗作業時CCD攝像器連續攝取位于清洗器爬行方向正前下方待清洗部位的圖像,該視頻信號通過高速圖像采集卡實施A/D轉換,形成最多可達256階的灰度等級并與存儲在計算機中的原始標準圖像灰度等級不斷進行比較。
原始標準圖像的灰度等級可以設置比較臨界點,即比較上限。只要CCD攝像器實時攝取的圖像灰階等級中有超出原始標準圖像灰階等級范圍比較上限的,工業控制計算機和相關軟件便啟動步進電機脈沖頻率控制指令,通過運動控制卡去降低左右兩臺步進電機的驅動轉速;清洗器爬行速度的快慢,間接反映了清洗力度的大小。
隨著污物分布狀態的變化,清洗器的爬行速度會跟著變化,也就是說清洗器的清洗力度跟著變化。
圖3 混濁度傳感器檢測系統框圖
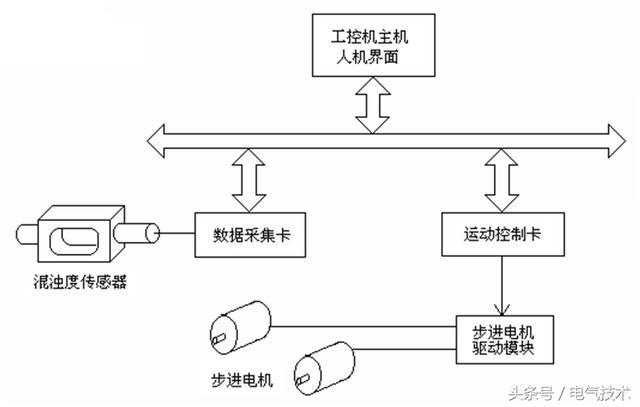
框圖表示清洗器工作時,受滾刷擦洗的污物與水混合組成的懸浮液受水泵作用必定要流經水泵吸口,此時安裝在水泵吸口處的混濁度傳感器將水流的不同混濁度轉換成變化著的電壓信號,該電壓信號經過數據采集卡處理實現A/D轉換后,送至工業控制計算機由相關軟件進行處理;控制輸出的脈沖頻率信號或“開、停”指令經多軸運動控制卡分別去控制左右兩臺步進電機的驅動轉速,水質的混濁度高,清洗器的爬行速度變慢,清洗力度加大;反之則清洗力度減小。
CCD圖像識別系統除了判別污物外,還可用于水下監視、攝像等擴展功能,但對那些非均勻圖案,如彩色馬賽克材料鋪就的水池則無能為力,會產生判斷誤差;而混濁度傳感器檢測系統適應范圍廣,性價比較高,反應靈敏,只是功能比較單一。從可靠性、生產成本和使用效果等幾方面考慮,以采用混濁度傳感器檢測系統為宜。
要真正實現智能化的自適應清洗,除了為清洗器配備能判別污物分布狀態的混濁度傳感器外,還應配套定向、定位傳感器。由于清洗器作業采用了轉向平行軌跡法,實際工作中,清洗器要依靠這些傳感器自動完成測距、后退、轉彎、平移等各種動作。
機械式定位傳感器簡單實用,但因是接觸式的,未留下動作空間,所以轉向前先得倒退,冗余動作過多。而非接觸式的紅外傳感器靈敏度高,穩定可靠,幾乎已是高端清洗器的標準配備,也是本案的不二選擇,為此清洗器裝有四支紅外測距傳感器,正前面兩只,左右兩側各一只,主要用于自動修正爬行軌跡。紅外測距傳感器有三種類型:散射型、對射型和反射型。清洗器主要工作在常規的游泳池中,不可能裝有反射面或對射接收器,故選用了E30—D100C1散射型紅外測距傳感器。
水池清洗器的控制系統融合了傳感器和計算機技術。計算機主機的配置以抗干擾性強的工業控制計算機為首選;混濁度傳感器的信號處理采用數據采集卡;驅動用步進電機的控制選用遠動控制卡。控制程序采用VB軟件和美國NI公司的Labview軟件編制,同時采用二套軟件的考慮是為系統留下擴展的余地。
3.2傳動系統及結構設計
根據設計要求,清洗器的清洗排量要達到1200L/min;最高爬行速度為40m/min。過去的老產品選用三相交流電機,為保證安全又要降為低壓42V,不得已配備了體積碩大的三相變壓器;傳動機構包括蝸輪蝸桿減速器、電磁離合器等,結構復雜,維修保養不便。為此選用了無刷直流電機,功率0.75kw,轉速3000r/min。
無刷電機的優勢在于免除了碳刷的日常維護,又因為使用直流供電,非常安全;驅動電機則選用了可調速的二相混合式步進電機,輸出最大扭矩可達6N·m,分別直接驅動清洗器兩邊的帶輪,大大簡化了結構。由于清洗器在水下工作,所以電機的密封相當重要,同時考慮到電機運轉時的溫升變化,需要及時散熱,特別采用了導熱性能和機械性能俱佳的鋁合金做電機的密封罩,以保證整機的可靠性。所有電機均為安全電壓供電,符合產品技術條件。
清洗器清洗作業時的爬行機構設計為齒形履帶結構。這主要基于兩點考慮,一是齒形帶輪組成履帶式輪系可增大清洗器與水池的接觸面積,不容易打滑,滿足清洗器在轉彎、移位時較高的定位要求;二是在測量水池面積和顯示已清洗面積等功能上可保證相當的精度,因為齒形帶的滑差率基本為零,如果步進電機的步距角為0.36?,那么步進電機每轉一圈需向其發送1000個脈沖,而此間清洗器的爬行距離S為:
S=2πr (1)
式中r是步進電機軸端齒形帶輪的半徑。
由此可得每個脈沖的爬行距離S´為:
S´=2πr/1000(2)
而對應的清洗面積A則分別為:
A=0.6S 或A´=0.6S´(3)
水泵無刷直流電機的殼體形狀特別,故采用鋁合金鑄件;水泵葉輪采用半開式彎葉片,葉片出口角ß=36?,葉片數3。葉片的曲面比較復雜,試用最新的激光快速成型法加工獲得成功。整機箱體由PVC塑料板材熔焊成型。
整套清洗器包括清洗主機、控制部分及手推小車,清洗主機為水下作業部分;工控機和電源箱為陸上控制部分,連接單相220V電源。
4關鍵技術及解決辦法
4.1混濁度傳感器
某些半導體物質在受到光照時會發生電學特性方面的變化,這種變化又被稱之為光電導效應和光生伏特效應。混濁度傳感器要工作在清洗器的水泵吸口處,容易滿足光電池的應用條件。這里采用了具有較高轉換效率的硅光電池板作為混濁度傳感器的光電轉換元件,理論上轉換效率可達17%。
另外,對光源的要求也比較高,必須有足夠的功率和穩定性,特別是它的光譜范圍應大部分落于硅光電池的峰值光譜區域,以提高傳感器的靈敏度,為此選用了鹵鎢燈。在光學設計時還要考慮光路的集中和均勻,保證混濁度檢測的正確性,避免形成點狀照射,遺漏檢測目標。混濁度傳感器的放大電路采用了雙極性集成信號放大器,放大增益和測量輸出電壓范圍均可調。輸出電壓為0~5V,能適用不同現場信號,具有很強的靈活性。
光電式混濁度傳感器的工作原理見圖4;當鹵鎢燈點亮后,提供了傳感器所需要的光源。光線經過透鏡的折射,均勻地聚集在硅光電池上。硅光電池的伏安特性將光信號轉換成電信號,經線性補償,由多級放大器對信號的比較放大后,輸出Vo到工控機中的PCL-818數據采集卡,計算機控制程序可以根據水泵吸口處水質的混濁度(反映為混濁度傳感器的信號強弱)輸出相應的脈沖來調節清洗器驅動用步進電機的轉速,從而提高清洗的工作效率。
圖4 光電式混濁度傳感器原理框圖
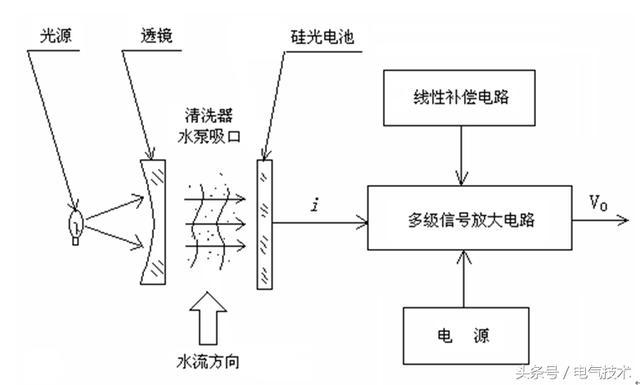
為了保證檢測的正確性,混濁度傳感器的測試口與清洗器的水泵吸口是相接的。傳感器的測試口兩邊分別裝有鹵鎢燈和信號放大電路板,外罩連接配備了密封圈;信號線引出口用環氧膠封閉。光源發射窗和接收窗由耐磨硬質石英玻璃制成,可防止水流中的沙石對光學鏡片的刮花,影響檢測效果。
4.2工控機配置及控制程序編制
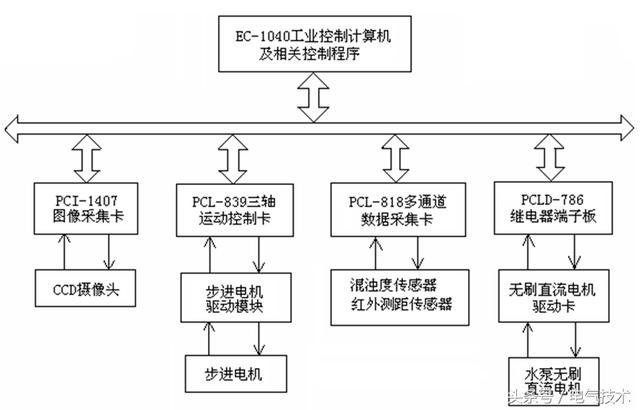
從清洗器操作和控制的要求及產品的性價比等諸方面考慮工控機選用了威達電公司的EC—1040,自帶LCD顯示屏,方便建立人機界面。研華公司的PCL—818數據采集卡用于濁度傳感器的信號處理和清洗器定位轉向紅外開關的信號檢測,PCL—839三軸步進電機控制卡用于清洗器驅動步進電機的控制,還選擇了美國NI公司的PCL—1407圖像采集卡用于CCD攝像器的視頻信號處理。清洗器控制系統框圖見圖5。
圖5 清洗器控制系統框圖
控制程序的編制軟件也有多種選擇方案,原則上以簡捷易懂為主要標準。目前流行的可視化編程軟件是不錯的選擇。清洗器的控制程序采用VB軟件和美國NI公司的Labview軟件編制。
工控機的控制對象除了清洗器智能化自適應清洗功能外,就是清洗器的爬行運動了。清洗器在作業時需要“爬”遍水池的四面八方,而步進電機在運轉中難免會發生失步現象,加之兩臺步進電機的參數不會完全一致,兩側的履帶式傳動機構也有松緊差異,所以清洗器換道時極有可能產生軌跡的偏移,影響清洗效果。
為此把正前向紅外測距測距設計成雙聯並排安裝的形式,在每次換道轉向180º前自動修正清洗器與池壁的垂直位置,保證了盡可能小的轉向誤差并消除了清洗時的累積誤差。清洗器放入水池的初始位置可以是任意的,不附加任何條件,這就要求在清洗作業前,先執行一個起始定位的程序,使得清洗器的出發點總是在水池的一角。
配合該程序的運行,清洗器兩側也裝上了紅外測距傳感器。另外,在時間程序清洗方式中利用四支紅外測距傳感器,可方便地實施隨機轉向。
4.3水下密封及安全防護
由于清洗器水下工作的特殊性,對水密封的要求甚高。水密封又分為動密封和靜密封。水泵葉輪出軸及步進電機出軸,需用動密封裝置,為此選擇天成密封件制造有限公司生產的機械密封圈,泄漏量僅0.3ml/h;步進電機出軸采用單端面機械密封,水泵葉輪出軸采用雙端面機械密封,并帶有機油油腔潤滑雙端面旋轉副。
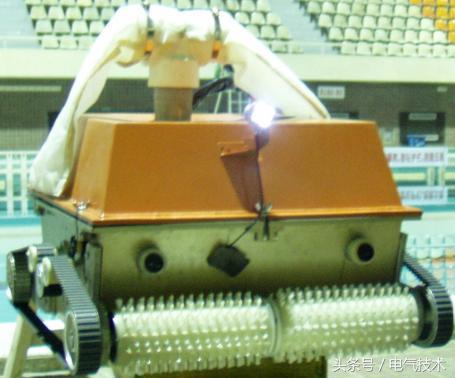
至于結合面的靜密封則采用了國家標準GB1235—92、GB3452.1—82中的橡膠密封圈以及溝槽尺寸。在使用安全方面,除了直流低電壓供電外,電纜線的連接方法和保護措施等都是設計時考慮的重點。插頭和插座均為具備防水標準的航空多芯系列產品,再輔以環氧膠封固措施,保證了使用安全。清洗器水下部分照片見圖6。
圖6
5結論
Q1Q-SSI-600型智能化水池清洗器同以往的水池清洗器相比,揉和進了計算機及傳感器技術,用先進高效的驅動元件取代了傳統的傳動機構,使原來的水池清洗器產生了質的飛躍,特別是智能化自適應清洗技術的開發,具備想當的創新性,并在上海游泳館得以應用。
當然由于基礎工業的相對落后,在外型設計、加工工藝、制作材料等方面與發達國家的產品相比還有差距,元器件的選擇上也受到一定的制約。鑒于國外的水池清洗器已進入家庭,國內不少住宅區的會所也修建了游泳池,相信水池清洗器的使用范圍將逐步擴大,以滿足人民群眾日益增長的物質文化生活的需要。
(摘編自《電氣技術》,原文標題為“具備污垢判別能力的智能化水池清洗器”,作者為崔陵軍、施兆良。)

責任編輯:售電衡衡
-

權威發布 | 新能源汽車產業頂層設計落地:鼓勵“光儲充放”,有序推進氫燃料供給體系建設
2020-11-03新能源,汽車,產業,設計 -

中國自主研制的“人造太陽”重力支撐設備正式啟運
2020-09-14核聚變,ITER,核電 -

探索 | 既耗能又可供能的數據中心 打造融合型綜合能源系統
2020-06-16綜合能源服務,新能源消納,能源互聯網
-

新基建助推 數據中心建設將迎爆發期
2020-06-16數據中心,能源互聯網,電力新基建 -

泛在電力物聯網建設下看電網企業數據變現之路
2019-11-12泛在電力物聯網 -

泛在電力物聯網建設典型實踐案例
2019-10-15泛在電力物聯網案例



-
權威發布 | 新能源汽車產業頂層設計落地:鼓勵“光儲充放”,有序推進氫燃料供給體系建設
2020-11-03新能源,汽車,產業,設計 -
中國自主研制的“人造太陽”重力支撐設備正式啟運
2020-09-14核聚變,ITER,核電 -

能源革命和電改政策紅利將長期助力儲能行業發展
-
探索 | 既耗能又可供能的數據中心 打造融合型綜合能源系統
2020-06-16綜合能源服務,新能源消納,能源互聯網 -

5G新基建助力智能電網發展
2020-06-125G,智能電網,配電網 -

從智能電網到智能城市