
電磁調速水泵機組起動過程的數值模擬
核心提示: 律,就可得出對應的該水泵機組起動過程中電磁調速電動機勵磁電流控制的規律,并在個矣際的計算機監督控制系統中進行了驗證,其轉速的變化基本符合數值模擬時設定的轉速變化規律。研究方法對其它異
核心提示: 律,就可得出對應的該水泵機組起動過程中電磁調速電動機勵磁電流控制的規律,并在個矣際的計算機監督控制系統中進行了驗證,其轉速的變化基本符合數值模擬時設定的轉速變化規律。研究方法對其它異步電動機拖動的
律,就可得出對應的該水泵機組起動過程中電磁調速電動機勵磁電流控制的規律,并在個矣際的計算機監督控制系統中進行了驗證,其轉速的變化基本符合數值模擬時設定的轉速變化規律。研究方法對其它異步電動機拖動的調速設備的控制軟件開發提供了有益的參考,具有定的實用價值。1引言在泵站工程中,可以通過調節水栗機組轉速來適應運行工況的變化調速控制是泵站節能和優化運行的,效途抒對于由電磁調速電動機驅動的水機組。可以組成以模擬調節器+監料1算機為結構的1令機監督系統53,實現機組的實時調速及優化運行。
水泵機組起動過程中要求,平滑,減小對水泵的沖擊;在滿足起動轉矩要求的前提下,盡可能減小起動電由電磁調速電動機驅動的水泵機組的起動特性良好與否是由調速電動機勵磁電流的控制規律決定的因此有必要探討勵磁電流發提供依據然而。單純依沿現場調試,經驗唯關傳動系統運動方程=從機從機摩+她損泵負21摩和似機1分,為磁離合器的轉勻摩擦力矩和損耗力。1;為折算到電機從動軸上的水泵負載轉矩為電機從動軸的轉動慣量12;602.為電機從動軸上1和柳分別為電機從動軸的角加速度重要,若缺乏經驗,極易造成事故,且調試過程歷時較長,本文欲通過數值模擬,來確定水泵機組起動過程中勵磁電流的控制規律,這樣,不僅可以大大減小現場調試的盲目性,避免事故的發生,而且能夠在比較短的時間內結合現場調試,較精確地確定擰制軟件中的控制參數2電磁調速起動過程的數值模擬2.1水泵機組起動過程中力矩平衡方程式7尺泵機組傳動系統由電磁調速電動機由鼠籠式異步電動機與電磁離合器組成,其中電磁離合器由電樞和磁極俎成。傳動設備和水泵纟1.成,如閣1所水根據動能守恒定理,有水泵轉子的飛輪慣量弋為傳動設備的傳動比在滿足水栗機組起動要求的前提下,也可以設定與2不同的水泵轉速變化規律,可得到不2.2勵磁電流控制規律的確定根據水泵機組起動過程的要求,可以設定起動歷時起動過程水泵終止轉速和水泵轉速在起動歷時內隨時間的變化規律,從而可得起動歷時內任時刻的水泵轉速取和水泵轉速變化率辦,由式17可求出該時刻的電磁調速電動機的勵磁電流大小,2,從而得到在起動歷時內勵磁電流的控制規律。
3實例3.1泵站基本資料某軸流泵站是座單機組小型泵站,泵站主要機電設備有3225型半調節立式軸流泵,詔191型電磁調速電動機和角皮帶傳動設備。電機額定功率55kW,角皮帶傳動比為276該泵站由計算機監督系統實現實時調速優化運行。
3.2數值模擬根據該泵站水泵機組的基本資料,式口中函數的具體達式如下設水泵機組起動過程歷時3,水泵終止轉速為350,且水泵轉速,隨時間的變化規律為線性關系,2由2可得到8鐘內任時刻的水泵轉速你和水泵轉速變化率咖〃屯由式17和式18求得對應時刻的勵磁電流,從而得到勵磁電流控制規律,3.
此軸即為電機主動軸轉速灸為與電磁離合器結構類型有關的系數,為勵磁電流3她摩子重量N;i,為磁極轉子轉動半徑m;S為轉差率;為水栗軸轉速4你和伽分別為7尺泵機組起動過程結束時的水泵轉速和電機從動般認為電磁離合器轉矩無損失。
泵負根據功率守恒原理,有擇負凡負由式912得到泵負水泵軸功率;你負為電機輸出功率1;從泵負為水泵軸負載力矩,矩和水泵摩擦力矩施摩組成,即,幾摩栗及栗和叟分別為水泵額定軸功率和額定轉速。,栗,和,分別為水泵軸承摩擦系數水泵轉子重量和水泵轉子轉動半徑,轉差率的定義式8從水泵機組起動過程中力矩平衡方程式1及式21句,可知水泵機組起動過程中的水栗轉速隨時間的變化率如〃故是水泵轉速你和調速電機勵磁電流心的函數你,4對于型號確定的水泵機組,該函數是確定的即,時問53.3電腦監督系統水泵機組起動過程控制軟件該軸流泵站的計算機監抒系統采用監矜計算機+校擬調節器結構模擬調節器為電磁調速電動機的擰制器系統控制原現4模擬信號監督計算機輸出擰制數字童經,轉換為模擬,315作為控制器的自動信號。經控制器內的可控整流電路脈沖移相觸發電路等控制供給電磁離合器中勵磁繞組的勵磁電流,從而帶動水泵負載運行。控制器采用單閉環控制系統,速度負反饋1巧山測,發電機捉供,開發起動過程控制軟件時,如何確定輸出控制數字量的給定規律是個關鍵問在已知勵磁電流控制規律的前提下,根據控制器的自動信號與勵磁電流的確定關系,可以得到計算機輸出控制數字量經,轉換后的輸出模擬信號的給定規律,從而可以得到計算機輸出控制數字量的給定規律由此可,通過數值模擬確定的勵磁電流控制規律為計算機輸出數字站的給定規律提供了可靠的依據,它是開發軟件的基礎=根據數字量給定規律,編制了水泵機組起動過程控制軟件。經現場調試和實際運行。水泵轉速變化過程堪本符合數值梭擬時設定的轉速變化規從而滿足了機組起動要求。起動過程平穩但需指出的是,機組首次起動和機組運行中斷個久又需冉次起動,這兩種1況數字量給定規律稍有不同因為后種情況下,水泵摩擦力矩大為減小,故其數字量給定值要比前種情況小水泵些,具體值可通過采用較小的水泵摩擦系數進行數值模擬確定該泵站控制系統的起動過程控制軟件考慮了這兩種情況,實際運行的結果明區別對待這兩種情況是必要的,它可以減小對水泵4結論通過數值模擬,確定電磁調速電動機驅動的7欠泵機組起動過程中的調速電機勵磁電流控制規律,從而可確定監督計算機輸出數字量的給定規律,為控制軟件的開發提供了可靠的依據,具有實際意義。
調速設備如變頻調速器的水栗機稂以及其它屯氣拖動系統的調速控制問數值模擬圮較可靠準確地確定控制軟件中重要控制參數的條有效途汔1丘傳忻。泵站節能技術。北京水利電力出版社,1985 2中國電工學會編著。風機水泵交流調速節能技術。北京機械工業出版社,1990135 3潘新民。微型計算機控制技術。北京人民郵電出版社,勵磁電流測速發電機傳動裝置電磁離合器控制器

責任編輯:電小二
免責聲明:本文僅代表作者個人觀點,與本站無關。其原創性以及文中陳述文字和內容未經本站證實,對本文以及其中全部或者部分內容、文字的真實性、完整性、及時性本站不作任何保證或承諾,請讀者僅作參考,并請自行核實相關內容。
我要收藏
個贊
-

現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -

深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量
-
PPT | 高校綜合能源服務有哪些解決方案?
2020-10-09綜合能源服務,清潔供熱,多能互補 -
深度文章 | “十三五”以來電力消費增長原因分析及中長期展望
2020-09-27電力需求,用電量,全社會用電量 -
我國電力改革涉及的電價問題


-

貴州職稱論文發表選擇泛亞,論文發表有保障
2019-02-20貴州職稱論文發表 -

《電力設備管理》雜志首屆全國電力工業 特約專家征文
2019-01-05電力設備管理雜志 -

國內首座蜂窩型集束煤倉管理創新與實踐
-
人力資源和社會保障部:電線電纜制造工國家職業技能標準
-
人力資源和社會保障部:變壓器互感器制造工國家職業技能標準
-
《低壓微電網并網一體化裝置技術規范》T/CEC 150
2019-01-02低壓微電網技術規范
-
現貨模式下谷電用戶價值再評估
2020-10-10電力現貨市場,電力交易,電力用戶 -

建議收藏 | 中國電價全景圖
2020-09-16電價,全景圖,電力 -

一張圖讀懂我國銷售電價附加
2020-03-05銷售電價附加
-
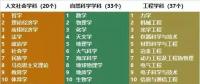
電氣工程學科排行榜發布!華北電力大學排名第二
-
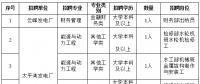
國家電網61家單位招聘畢業生
2019-03-12國家電網招聘畢業生 -

《電力設備管理》雜志讀者俱樂部會員招募
2018-10-16電力設備管理雜志
